 Bahasa Indonesia
Bahasa Indonesia



FITUR BERMOTOR
Fitur Motor Induksi
1, Umumnya Motor Induksi Mikro mengacu pada motor yang diputar oleh induksi. Motor Induksi mengandalkan kapasitor dan elektromagnetisme saat memulai dan berputar. Meskipun torsi awalnya tidak terlalu tinggi, ia memiliki struktur sederhana, efisiensi tinggi, dan dapat berputar terus.
2 Motor fase tunggal memiliki arah terbalik dengan putaran saat dioperasikan. Pis mengubah arah putaran motor satu fasa hanya setelah motor berhenti.
3. Motor tiga fase bergantung pada suplai tiga fase. Ini memiliki efisiensi tinggi dan bisa mendapatkan torsi awal yang tinggi.
Fitur Motor Reversibel
1 Motor Motor Reversibel memiliki rem gesekan di bagian belakang bodi motor, yang dirancang untuk aplikasi di mana pembalikan arah sering diperlukan. Untuk rem gesekan, silakan periksa Gambar 1. Lembab dengan pegas berdampak pada cakram rem yang berputar dan disuplai dengan pers terus menerus. Fungsi rem gesekan adalah sebagai berikut:
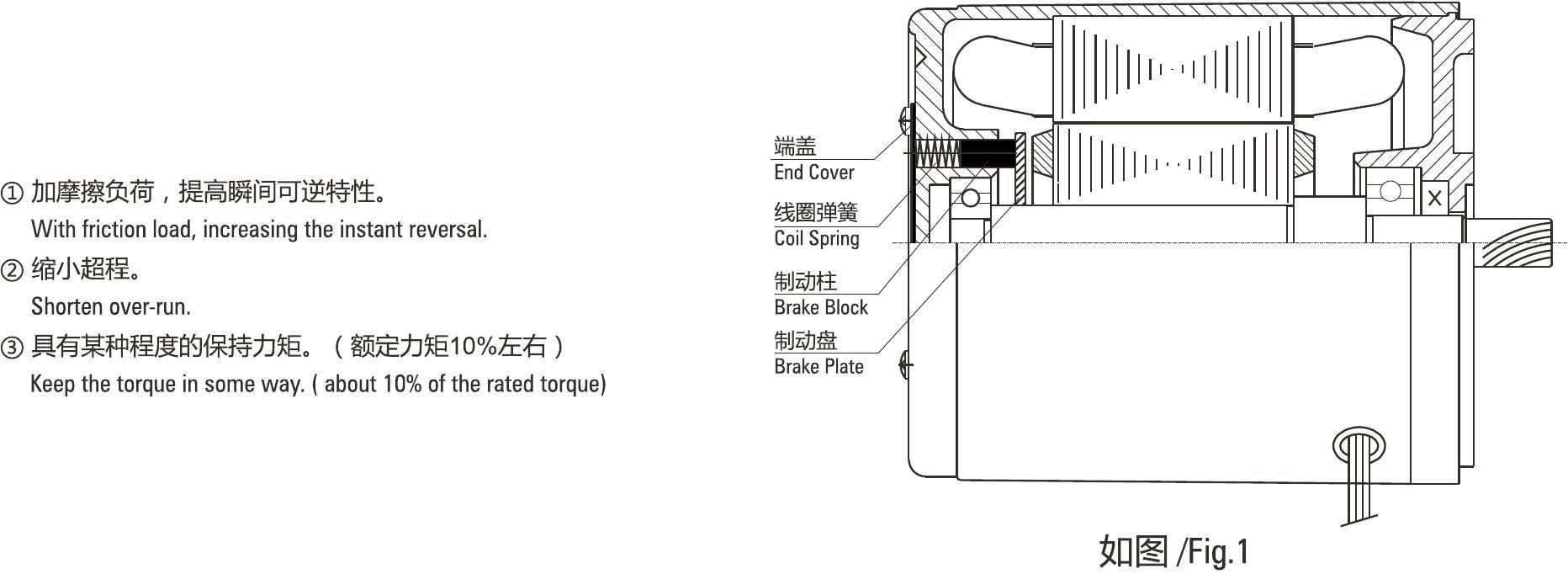
2 Torsi penahan atau lebih dari rem gesekan dan over-run tercantum dalam tabel 1. Ini hanya untuk referensi. Karena itu akan berubah sesuai dengan periode berputar serta suhu. Harap perhatikan juga bahwa torsi mungkin sedikit lebih rendah dari yang tercantum dalam tabel saat dioperasikan pada awalnya.
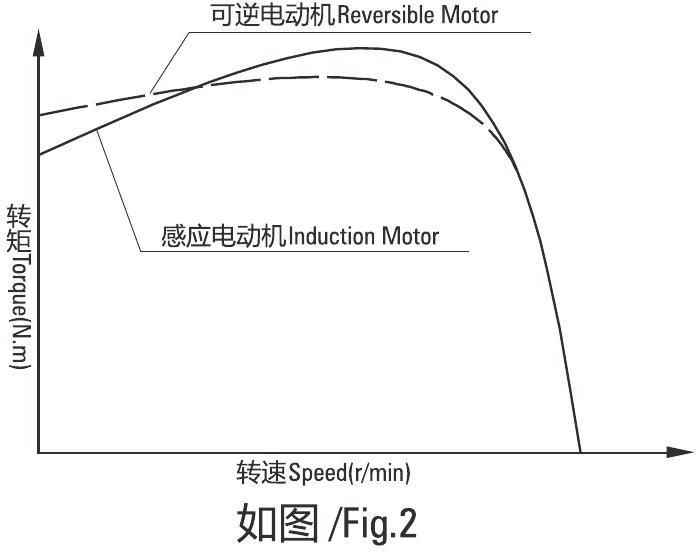
3.Motor Reversibel, seperti Motor Induksi, distarter oleh kapasitor dan memiliki karakteristik torsi yang sama dengan Motor Induksi. Tetapi Motor Reversibel dirancang dengan torsi awal yang lebih tinggi untuk meningkatkan fitur pembalikan instan. Tolong periksa gambar 2.
Tabel 1. Pertahankan Torsi Dan Menyerbu
| Tahap | Ukuran | Keluaran | Model Motor | Pertahankan Torsi | Menyerbu | |
| mm | W | N.cm | Kgf.cm | Siklus | ||
| Fase-Nyanyian | 60 | 6 | 2RK6 | 0.5 | 0.05 | 4 |
| 70 | 15 | 3RK15 | 1.3 | 0.13 | 5 | |
| 80 | 25 | 4RK25 | 1.5 | 0.14 | 5 | |
| 90 | 40 | 5RK40 | 4.0 | 0.40 | 6 | |
| 60 | 5RK60 | |||||
| 90 | 5RK90 | |||||
| 120 | 5RK120 | |||||
Matikan Fitur Motor Rem Elektromagnetik Tipe Aktif
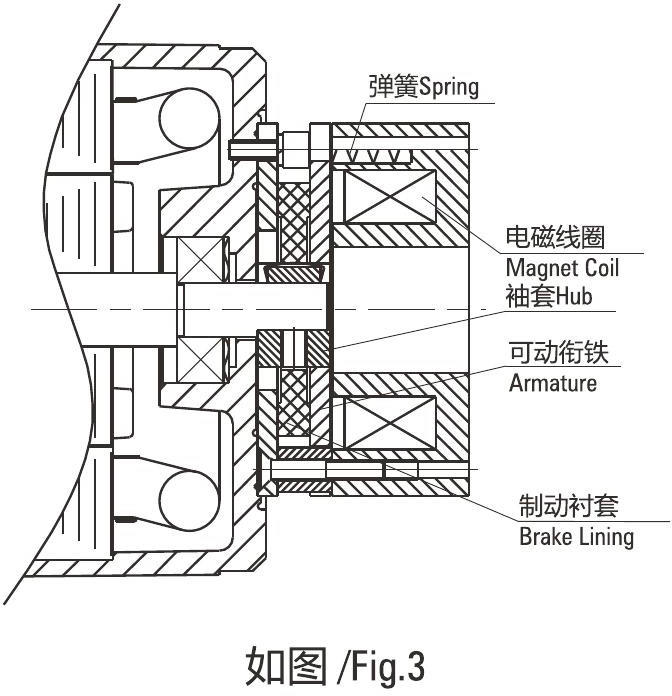
1、 Prinsip Struktur dan Operasi
Tabel 3 adalah struktur untuk Motor Rem Elektromagnetik. Kami memproduksi Power Off Activated Type. Mengerahkan tegangan pada belitan, itu akan memagnetisasi angker yang ditekan oleh pegas. Motor akan dalam tahap berputar, ketika ada reaksi balik antara armature dan pelek rem. Setelah tegangan belitan dikurangi, di bawah pengaruh pegas, angker menekan pelek rem, yang akan menciptakan gaya rem. Kemudian motor berhenti.
2、 Karakteristik Rem Elektromagnetik
Ini adalah Rem Elektromagnetik Tipe Aktif AC Power Off yang terhubung langsung dengan motor. Ini akan berhenti berkedip dan tetap memuat saat catu daya dimatikan. Ini akan menjaga torsi antara 0,05-2,0 N.m. Ini sangat cocok untuk rem pengaman dalam keadaan mati secara tidak sadar. Elektromagnetik dapat mengubah arahnya sering. Itu bisa dihentikan 6 kali dalam satu menit. Tapi pastikan itu berlangsung selama 3 detik atau lebih.
Setelah kami mengatur commutating loop di rem, itu dapat berbagi catu daya dengan motor.
Nilainya standar. Ini akan berubah dalam kondisi yang berbeda. Saat benar-benar digunakan, pastikan suhu permukaan motor kurang dari 90 °C.
3、 Fitur untuk Waktu Mulai dan Waktu Rem
Waktu mulai berarti waktu untuk waktu mulai motor ditambah waktu pelepasan rem elektromagnetik. Waktu rem berarti waktu dari matinya listrik hingga saat motor benar-benar berhenti. Over-run, waktu mulai dan waktu rem akan berbeda sesuai dengan aplikasi yang berbeda.
Tabel 2. Rem Elektromagnetik (Tipe Mati Aktif)
| Phase | Ukuran Keluaran | Tegangan V | Frekuensi Hz | A . saat ini | Masukan W | Pertahankan Torsi | Over-run | ||
| MM | W | N.cm | Kgf.cm | Siklus | |||||
| 1 fase | 70 | 15 | 110 120 220 230 | 50/60 | 0.091 | 8.2 | 0.5 | 50 | 3.5 |
| 80 | 25 | ||||||||
| 90 | 40 | ||||||||
| 60 | |||||||||
| 0.111 | 10.0 | 1.0 | 100 | ||||||
| 90 | |||||||||
| 120 | |||||||||
| 100 | 120 | ||||||||
| 140 | |||||||||
| 200 | 0.144 | 13.0 | 2.0 | 200 | |||||
| 3fase | 60 | 6 | 220~230 | 50/60 | 0.073 | 6.6 | 0.25 | 25 | |
| 70 | 15 | 380~415 | 0.037 | 6.6 | 0.25 | 25 | |||
| 80 | 25 | 200~230 380~415 | 0.091 | 8.2 | 0.5 | 50 | |||
| 90 | 40 | ||||||||
| 60 | 0.046 | 8.2 | 0.5 | 50 | |||||
| 90 | 200~230 380~415 | 0.111 | 10.0 | 1.0 | 100 | ||||
| 120 | |||||||||
| 100 | 120 | 0.056 | 10.0 | 1.0 | 100 | ||||
| 140 | |||||||||
| 200 | 200~230 380~415 | 0.144 | 13.0 | 2.0 | 200 | ||||
| 0.144 | 13.0 | 2.0 | 200 | ||||||
Fitur Motor Kontrol Kecepatan
1, Ini adalah unit pengontrol dan motor. Hanya perlu terhubung satu kali. Kecepatan dapat dengan mudah disesuaikan dengan potensiometer. Pengontrol diperbaiki dengan loop kontrol kecepatan, kapasitor, penetapan kecepatan, dan lain-lain. Tidak ada fungsi penghentian instan di unit.
2, controller dapat membuat variabel kecepatan antara 90-1350rpm pada 50 Hz dan 90-1650rpm pada 60Hz.
3 Tolong jangan menjalankan motor dengan kecepatan rendah untuk waktu yang lama agar tidak terlalu panas.











